Core collapse supernovae (CCSNe) occur at the end of the life of massive stars between 8M☉ and 100M☉. Due to the force of gravity, the core of the star will collapse until it reaches nuclear densities. The equation of state (EOS) stiffens above nuclear density and the inner core rebounds generating a shock wave that propagates outward. The shock wave eventually stalls because of lost energy from nuclear dissociation and neutrino emission. The stalled shock becomes an accretion shock. If the shock remains stalled, matter will accrete onto the proto-neutron star (PNS) until it forms a black hole. However the shock can be revived within 0.5 - 3s by some explosion mechanism. There are two likely explosion mechanisms that might be present in CCSNe: The neutrino mechanism and the magnetorotational mechanism. The neutrino mechanism is considered to be more likely. It is thought that some of the energy from the neutrinos released during core collapse is reabsorbed behind the initial shock and this reabsorbed energy powers the explosion. The magnetorotational mechanism is more likely to be present in rapidly rotating CCSNe. A rapidly rotating pre-collapse core can form a millisecond period PNS and if a very strong magnetic field is also present, the combination of the two could power the explosion.
A symmetrical core collapse will not emit gravitational waves (GWs); however asymmetries in CCSNe are expected to emit GWs that could be within the sensitivity range of our current interferometers. GW signals from the magnetorotational mechanism are typically shorter and have a larger amplitude than those from the neutrino mechanism. They are typically characterized by a spike at core bounce. GW signals from the neutrino mechanism are characterized by having features produced by turbulence. They are typically between 0.3 - 2s long and have an amplitude of 10^-22 if the source was 10kpc away.
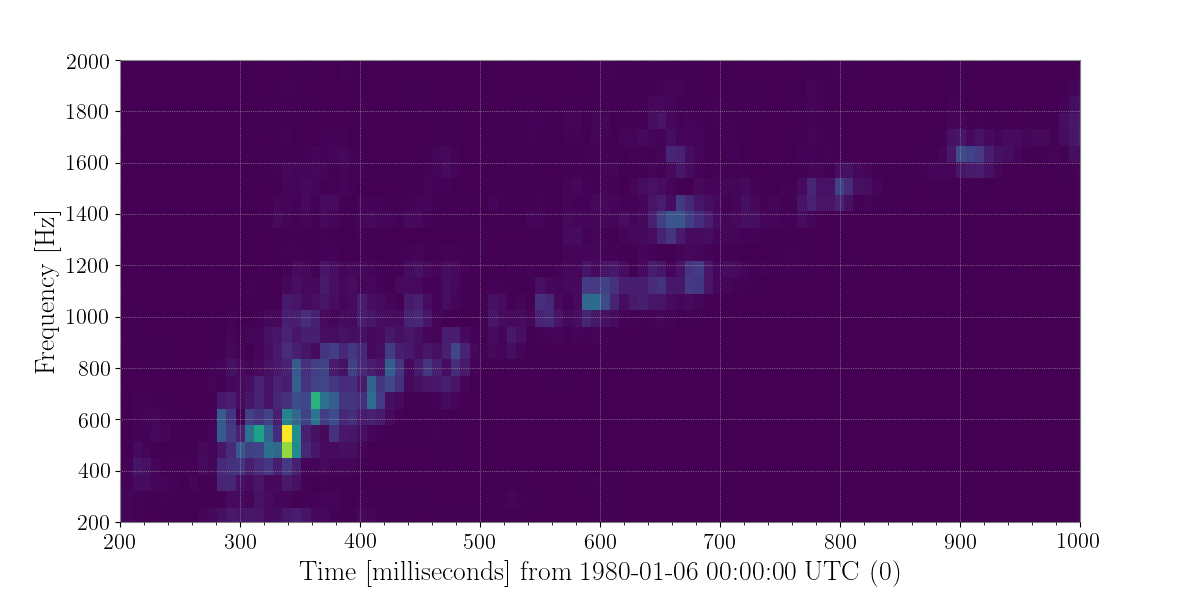
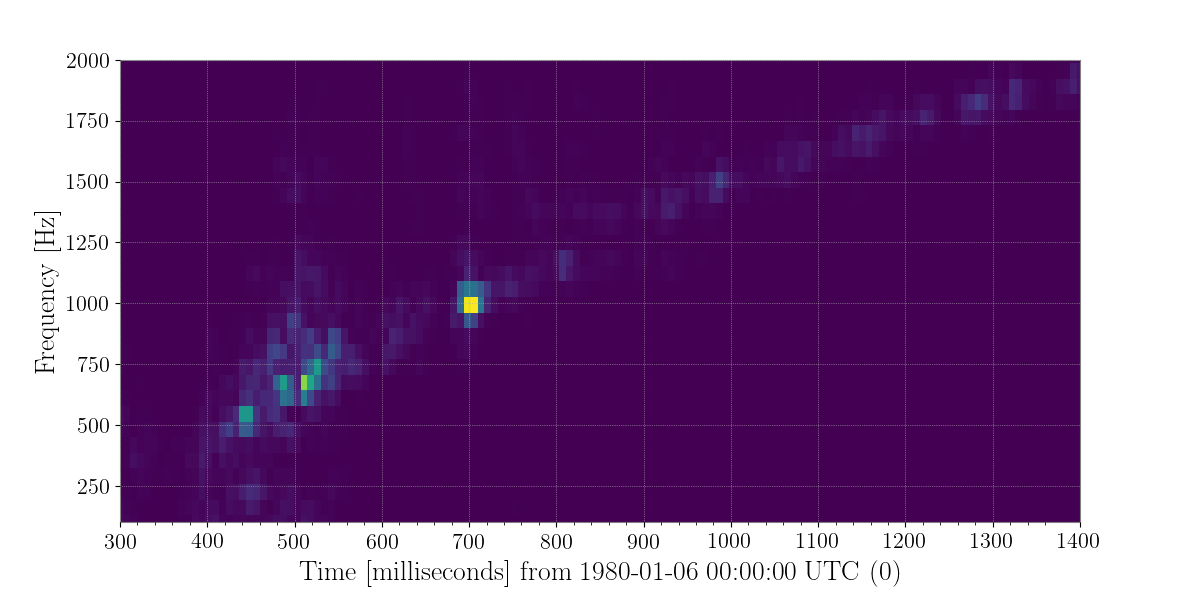
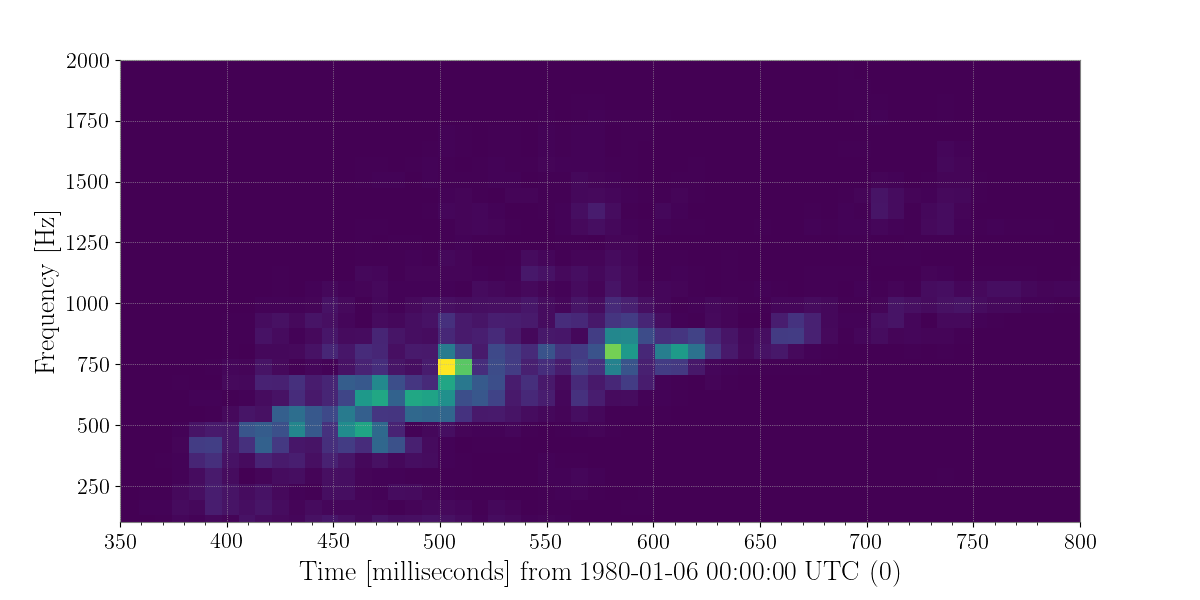
In the post bounce phase, multiple different processes could be responsible to the emission of GWs in the neutrino mechanism model. These include convection inside the PNS and the postshock region, the standing accretion shock instability (SASI), and nonaxisymmetric instabilities. Morozova et al. (2018) found that for most CCSNe, the GW signal in the first 50 ms after bounce depends on the progenitor mass and the EoS. This early signal is weaker than other features in the GW signal except in the case of their rotating model. After this signal, there is 50 ms quiescent phase followed by the dominant part of signal beginning around 150 ms after core bounce, with frequencies ranging between 300 to 2000 Hz.
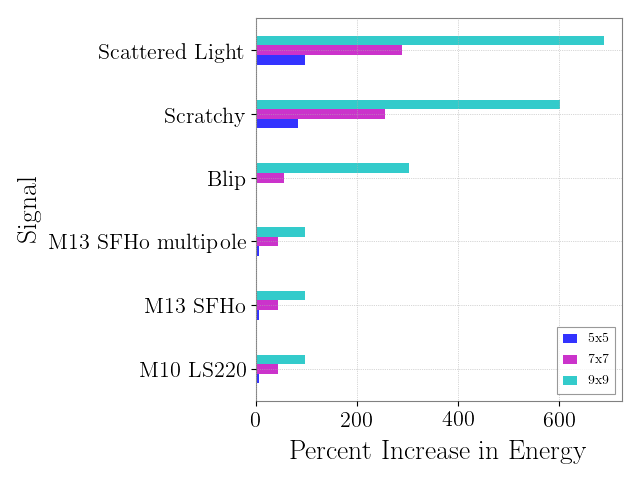
The GW signals from these events would give us more information about the astrophysical parameters of the sources including the likely explosion mechanism. Before such information can be discerned, the signal must be found in the gravitational wave data. Although numerical relativity simulations exist for these signals, the stochasticity of the explosion and the computational cost makes finding these signals impossible to do with match filter search. In addition, the signal strength is expected to be small and a galactic CCSNe is expected to be our best bet at seeing a signal. Thus, any improvement in recovering more energy from a generic supernova signal will prove critical to discovering one occurring in our galaxy.
Back to top