Dark Matter, despite the strong theoretical and observational evidence to support its existence, continues to elude detectors. If dark matter is composed of weakly interacting massive particles (WIMPs), bubble chambers may be an effective way to detect dark matter. In order to unambiguously detect WIMPs, we must gain a better understanding of the background events present in a bubble chamber. A key step to understanding the backgrounds in the newly assembled prototype Xenon Bubble Chamber (XEBC) is accurate 3D reconstruction of bubble positions. To do this, we use a photo of the nucleation event with two separately angled mirrors to provide a stereoscopic view of each bubble. The accuracy of this 3D reconstruction relies on an optical model of the chamber, which can be tuned using features with known locations in the chamber images. We produce a goodness-of-fit function that quantifies agreement between target positions of rays and simulated position of rays, which when optimized properly can result in a 3D reconstruction that accurately reproduces chamber walls. We go over the motivation for this project and the details of the optical model that simulated the chamber and traced the rays for the goodness-of-fit function.
Dark Matter and You
The term dark matter originates from the fact that we expect to see more matter when observing galaxies, but we see much less than predicted by our models. We do expect, however, that dark matter behaves in certain ways based on the standard model and cosmology. The prevailing theory is that dark matter is most likely a weakly interacting massive particle, or WIMP for short. Detection of WIMPs has yet to occur, but there are detectors being created that could potentially detect them.
Dark Matter In Action
A dark matter halo (blue) causing a cluster of galaxies (yellow dots) to be gravitationally bound. This simulation demonstrates the amount of dark matter we expect for large gravitationally bound systems.
Detection with Bubble Chambers
Bubble chambers are well suited for the detection of WIMPs. These chambers detect particles by holding a target fluid in a metastable state where a significant enough energy deposition causes nucleation to occur. This means that if a particle with enough energy collides with a molecule of our target fluid, we see bubbles as a way to confirm that a particle traversed through the chamber. We can determine what particle interacted based on the acoustic signal produced by the bubble and, in our case, the photon produced by the scintillation in the prototype Xenon chambers. In order
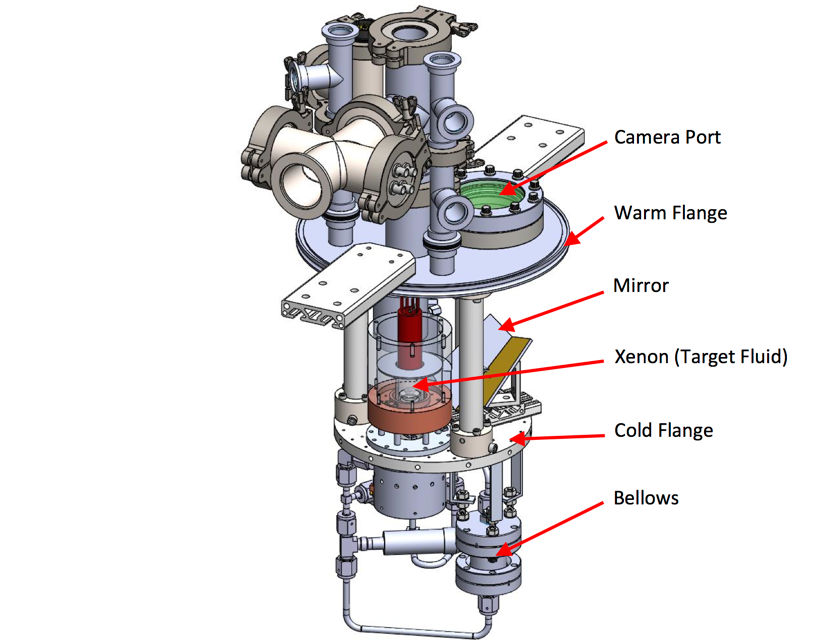
Schematic Of The Xenon Bubble Chamber
The prototype Xenon bubble chamber. WIMPs interacting with the target fluid are, in theory, detectable by this apparatus and images of events are captured by a camera and mirrors.
Location: A Caveat
The main hurdle with the current XEBC is location of events within the chamber. The location of the bubble in the chamber affects the acoustic signal and gives information about the photoemission from scintillation. It also helps discriminate against ambiguous events or a concentration of ambiguous events in a chamber, as we expect dark matter events to be relatively uniform throughout the chamber.
Geometry Fitting
To determine the location of events within the chamber, we build a 3D reconstruction of the chamber using two separately angled mirrors and a photo to attain a stereoscopic view of each bubble. To ensure this 3D reconstruction is accurate, we use known locations in the chamber to write a goodness of fit function. Rays are traced from the camera CCD to geometric surfaces in 3D space, refracting through the camera port and reflecting off the mirrors to the chamber, consisting of 5 cylinders . The function optimizes parameters in our optical model to quantify agreement between where the rays interact with the mirrors and cylinders in the simulation and where we expect them to interact based on reference pixels and their locations in a cylindrical coordinate system. This involves fitting a 13 parameter space, the parameters being camera position, camera angles, focal length, mirror positions, and mirror angles.
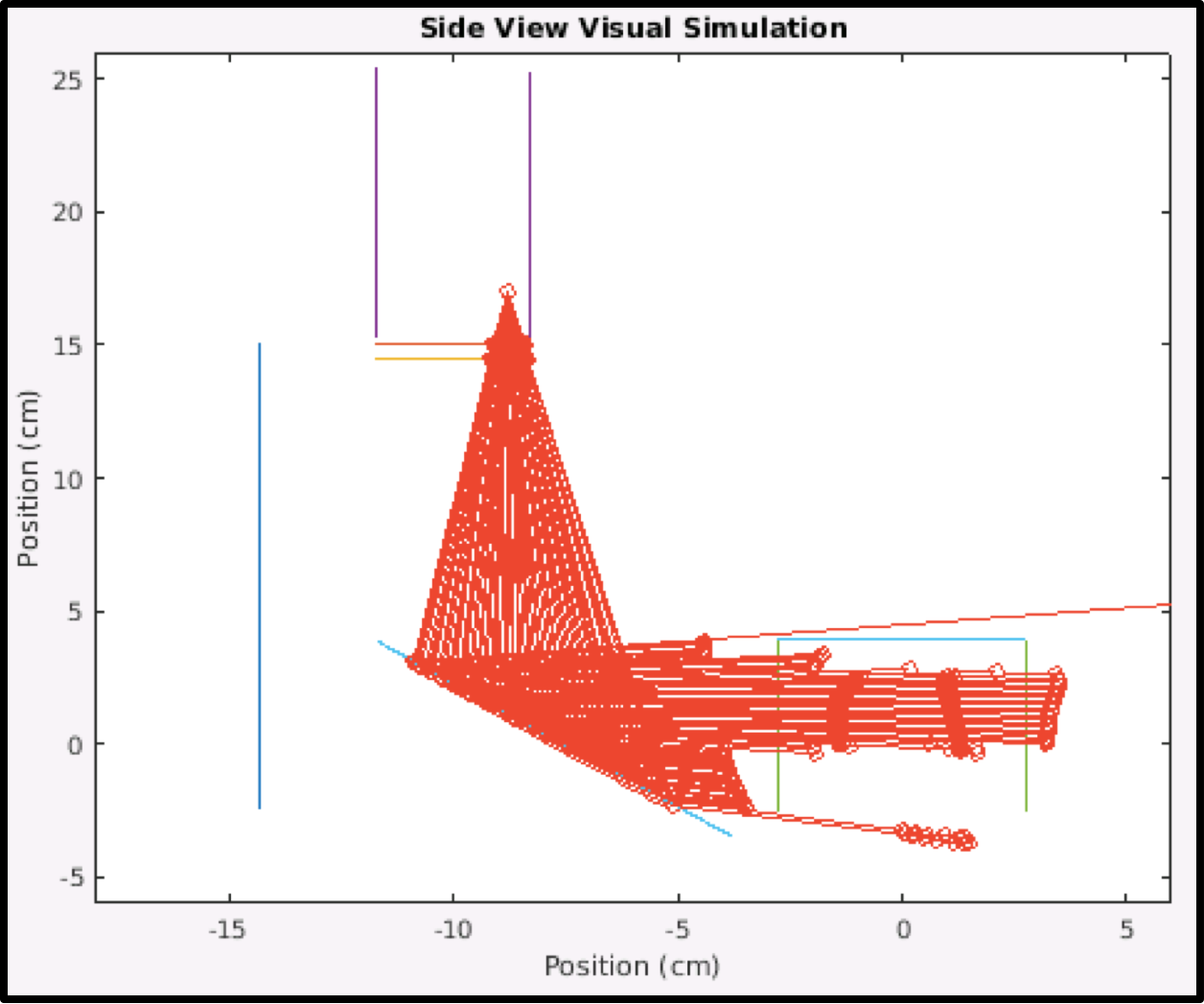
Side Visualization
A side view simulation of rays being traced from the camera (single point), through the view port and towards the simulated chamber.
Example Points for Fitter
Examples of reference pixel points chosen for the fitter function. These points are paired with points in a cylindrical coordinate system to specify their location three dimensionally to generate residuals for a least-squares fit.
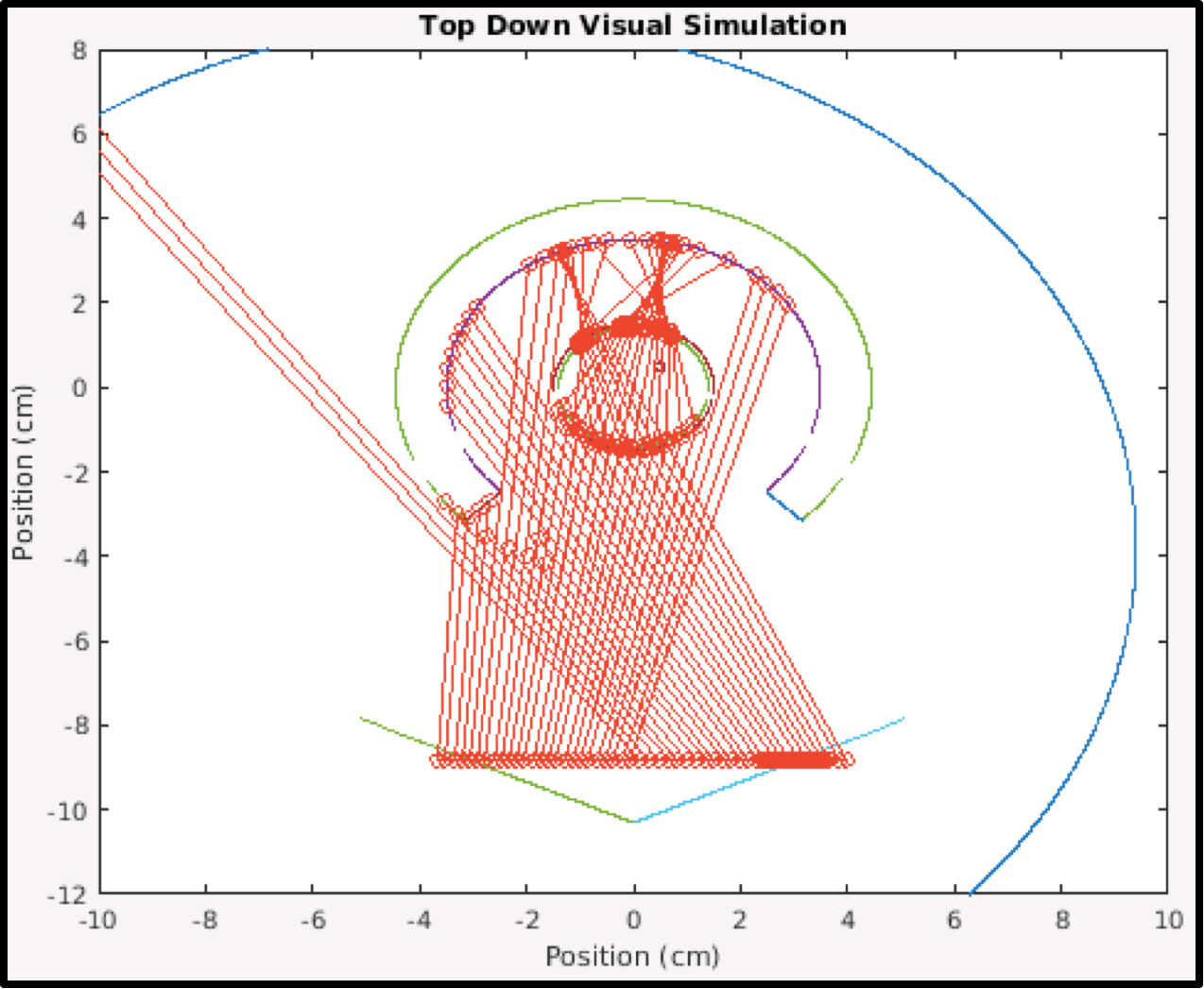
Top Down Visualization
A top down simulation of rays being directed from the mirrors to the interior of the chamber.
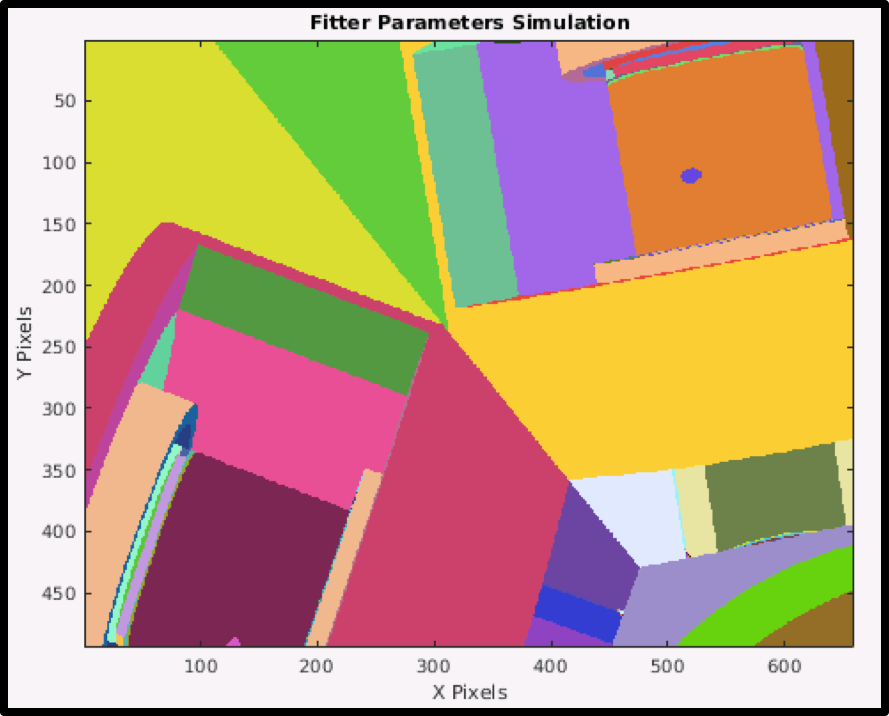
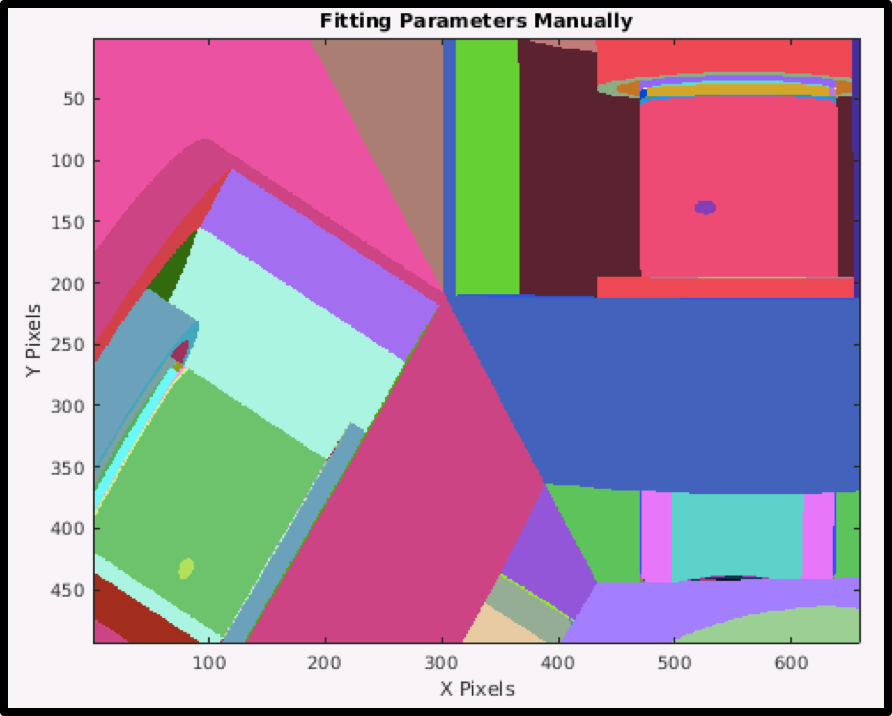
Resulting Fits
The right image shows the best fit possible with the function at this point, while the left image shows fitting manually. While the function produces a reasonable fit, it needs to be refined before it can produce chamber parameters accurate enough to allow for 3D reconstruction of the chamber. At this point, the main infrastructure is in place and it just needs to be finely tuned.
Function's Fit
Fitting by letting the fitter function step through the parameter space.
Manual Fit
Fitting with a more hands-on approach, manually adjusting parameters.
Future Usage
With a fitting algorithm in place, 3D reconstruction of the chamber can accurately locate events within the chamber. This locational information can refine acoustic signature and photoemission data streams and help discriminate against spurious events, such as nucleation occurring on the walls of the chamber.
Affiliations
This material is based upon work supported by the National Science Foundation under Grant No. AST-1359462, a Research Experiences for Undergraduates (REU) grant awarded to CIERA at Northwestern University. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
For questions, please email me at jarroyo3@hawk.iit.edu