Kilonova example and implications for future work
As an example of the insight one could gain with this tool, we plotted the five-sigma depth on an arbitrary night at an arbitrary time over the 90% confidence area for a simulated kilonova event. The colored region is the localization area. The top row is a binary neutron star merger detected with two GW detectors. The middle row is a neutron star - black hole merger with four detectors online, and the bottom row is a different neutron star - black hole merger with three detectors. Viewing conditions in the Y-filter are shown at three different times on the morning of January 1st, 2030.
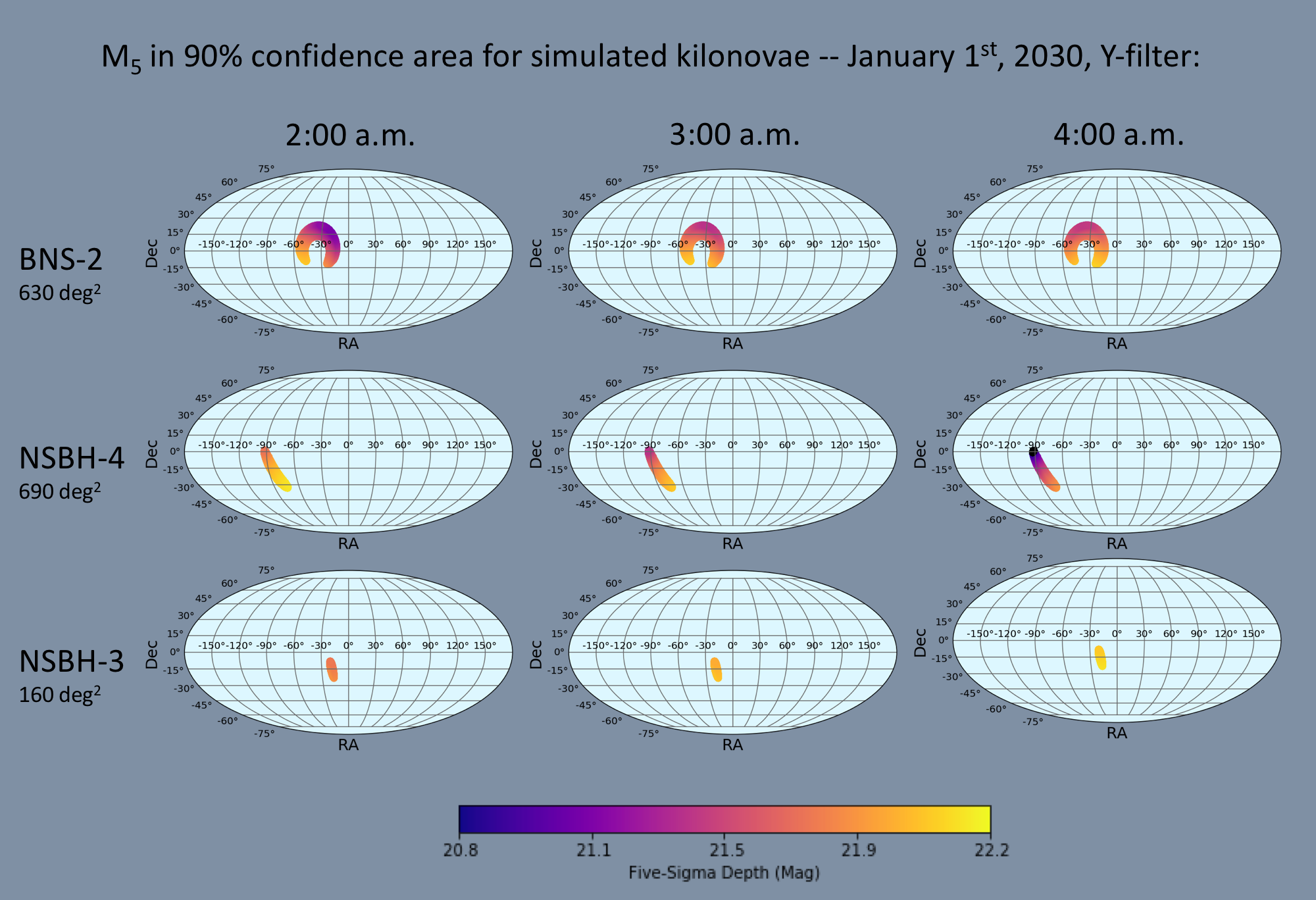
Analysis of these results reveals important implications for follow-up strategies. If BNS-2 were detected at 2:00 a.m., this figure suggests that viewing should begin in the southwest corner of localization and perhaps jump to the southeast corner before tiling the northern segment. If NSBH-4 were detected at 2:00 a.m., LSST should perhaps begin viewing at the northern end because conditions there will deteriorate more rapidly than in the southern end. If NSBH-3 were detected at 2:00 a.m., the small localization area suggests that one could wait until viewing conditions improved at around 4:00 a.m. before beginning observation at all.
In general, the tool reveals that the conditions for observing a particular event may be significantly anisotropic and variable in time within the necessary viewing area, confirming that effective tiling strategies should consider viewing conditions when determining where to look and when.